Introduction
A. E. M Ridwan
Graduate Research Assistant at HiX Lab
PhD Student at Kennesaw State University

About Me
Biography
My name is A. E. M Ridwan. I have experience working as a lecturer at Feni University in Bangladesh, where I taught courses such as Structured Programming Language, Data Structures, Algorithms, and Computer Graphics. I have completed my B.Sc. in Computer Science and Engineering from BRAC University with a Minor in Mathematics. I have two years of experience working as a ST (Undergraduate Teaching Assistant) at BRAC University, and I have competed in a few national robotics contests.
I am a research enthusiast. I have experience in quantum machine learning. I'm currently working in the field of hybrid QCNN.
| Name | A. E. M Ridwan |
|---|---|
| Birthday | September 1997 |
| Age | 26 years |
| Address | Shantinagar, Dhaka |
| Phone | (+88) 01521429557 |
| ridwanshihab14466@gmail.com | |
| A. E. M Ridwan |

-
Kennesaw State University
( Fall 2020 — Current )GRA at HiX Lab
add details
-
Feni University
(Spring 2022-Fall 2022)Lecturer
Structured Programming Language
Data Structure
Algorithms
Computer Graphics
-
BRAC University
( Spring 2020 — Fall 2021 )ST(Undergraduate Teaching Assistant)
Numerical Methods
Programming Language I(Java/Python)
Data Structure
-
Kennesaw State University
( Fall24 — Current )PhD Student
-
BRAC University
( 2017 — 2021 )Bachelor of Science in Computer Science and Engineering
-
BRAC University
( 2017 — 2021 )Minor in Mathematics
-
BRAC University Computer Club
( Fall 2019-Spring 2021 )Lead Instructor
BUCC Academy organized by BRAC University Computer Club
-
BRAC University Computer Club
(Summer 2019-Summer 2020 )Former Assistant Director
BRAC University Computer Club (BUCC) Department of Human Resource
-
BRAC University Computer Club
Former Senior Executive
Robotics club of BRAC University Department of Finance
robotics competition
BRACU CHARIOTEER
robotics competition
BRACU CHARIOTEER

BRACU CHARIOTEER is a helping hand for the physically challenged people. It empowers the physically challenged people. It helps the persons to move who doesn’t have a very essential body part.
This bot can be controlled with only one finger tip. It has a very responsive joystick and high torque motors which can make it move around 20kmph. We used here track chain instead of normal wheel which helps it to climb the stairs by taking the front part up.
Car seat has been used here instead a normal seat which is very comfortable and also adjustable for better comfort and sleeping. The seat also adjusts automatically using gyroscope sensor when it climbs the stairs. ECG sensor and Pulse sensor are used on the bot so that the person can track his body condition and at emergency cases he can send message to his family members and ambulance with the location coordinates. An IP camera is also used to monitor his physical condition and a medicine and food reminder is also there.
Robotics competition
SURVEILLANCE ROBOT
Robotics competition
AUTONOMOUS TRAIN TRACK SURVEILLANCE ROBOT

This robot is an autonomous robot which finds the faults on the train tack. It can run on the same track where the trains run. It use IR and Ultrasonic sensors to find the faults on the train track. If it find any faults on the track it stops there and send the location to the control room and inform what type of faults there.It also use sound sensor to detect
abnormal sound of the track and predict the possible problems.It use IP camera to send video feed to the control room. It also use solar to its power backup.
University Project
Bike accident detector
University project
Bike accident detector and remedy

In our overcrowded world, countries like Bangladesh have devolved into war zones, withthousands of people becoming disabled or worse, dying as a result of traffic accidents. The number of bikes in Dhaka has expanded dramatically as a result of the recent popularity of ride- sharing apps such as Pathao, Uber Moto, Shohoz, and others. As a result, bike accidents have become an everyday thing, we felt the need of an improved bike safety system that ensures biker’s proper emergency services.
In this paper, we have proposed a system that constantly detects bike accidents using MPU6050 (gyro sensor and accelerometer), SIM808 (GPS+GPRS+GSM), Raspberry Pi 3 Model B and Arduino Uno. We also have used a USB camera to record the previous 30 seconds of the accident to identify the reason behind this misfortune. We have placed the proposed system on the surface of the bike and the camera behind the bike’s seat. If an accident occurs, the sensors will trigger, capture the video information of why the accident has occurred and send a message containing the number and location of the biker to the nearest hospitals, police stations and registered family members.
University Project
Market Management System
University Project
Market management system
Market management system is a system for collecting shop rent and mantaining shop, developed using django. Also capt some basic unit test case
University Project
PID LFR with webot
University Project
PID LFR with webot
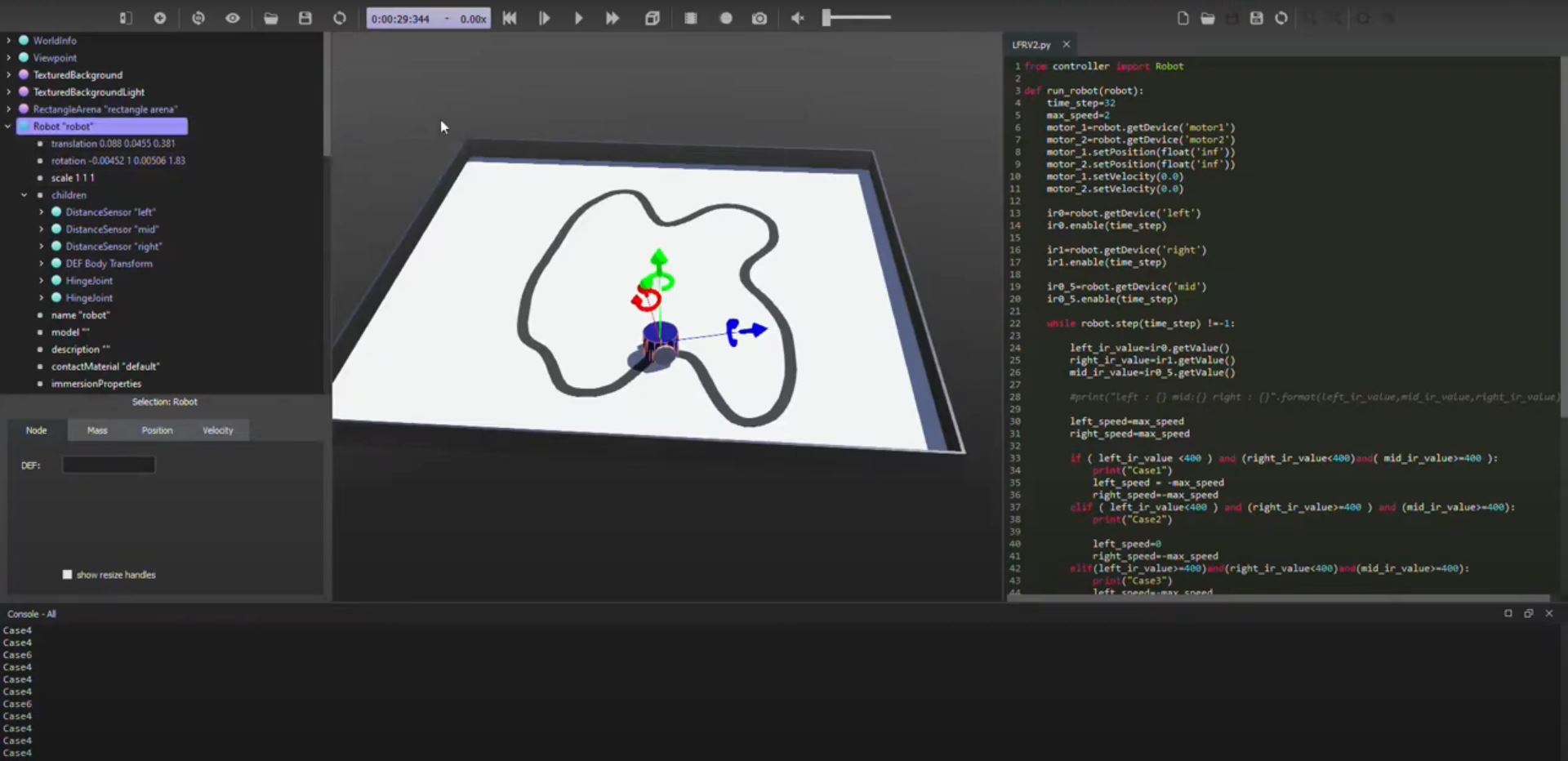
Building the Environment: Created a world and floor with a textured background, light, and rectangular arena. Designing the Robot: Used a robot with two wheels and two hinge joints. Integrated three infrared sensors (middle, right, left) for line detection. Creating Tracks: Went to the Tinkercad website to design tracks. Downloaded and imported the tracks to the web software. Ensured correct placement above the surface and adjusted colors for sensor differentiation. Line Following Logic: Used PID algorithm for line following. Discussed the role of proportional, integral, and derivative components in PID. Described how PID helps in maintaining the robot on the line smoothly. IR Sensor Detection: Demonstrated how IR sensors detect light color on different surfaces. Used conditional statements based on sensor values for line following. PID Algorithm Explanation: Discussed the graphical representation of PID action. Highlighted the significance of proportional, integral, and derivative components in achieving smooth motion. Multiplier Arrays: Utilized multiplier arrays to calculate sensor values. Explained the use of different arrays (four and five array) and their impact on performance. PID Constants (kp and kd): Described the proportional constant (kp) and how it is calibrated with array values. Explained the derivative constant (kd) and its role in calculating motor speed. Motor Speed Calculation: Explained the process of calculating motor speed using PID constants. Described how left and right speeds are adjusted based on sensor input. Threshold Conditions: Set threshold conditions for speed to ensure stability. Implemented if-else conditions to control robot speed. Enhancing Smoothness: Emphasized the importance of the number of IR sensors in achieving smoother line following. Showed that increasing the number of sensors improves the robot's performance. Conclusion: Summarized the effectiveness of PID algorithm and the impact of sensor count on line-following precision.
University Project
Home Automation System(LabVIEW)
University Project
Home Automation System Using LabVIEW
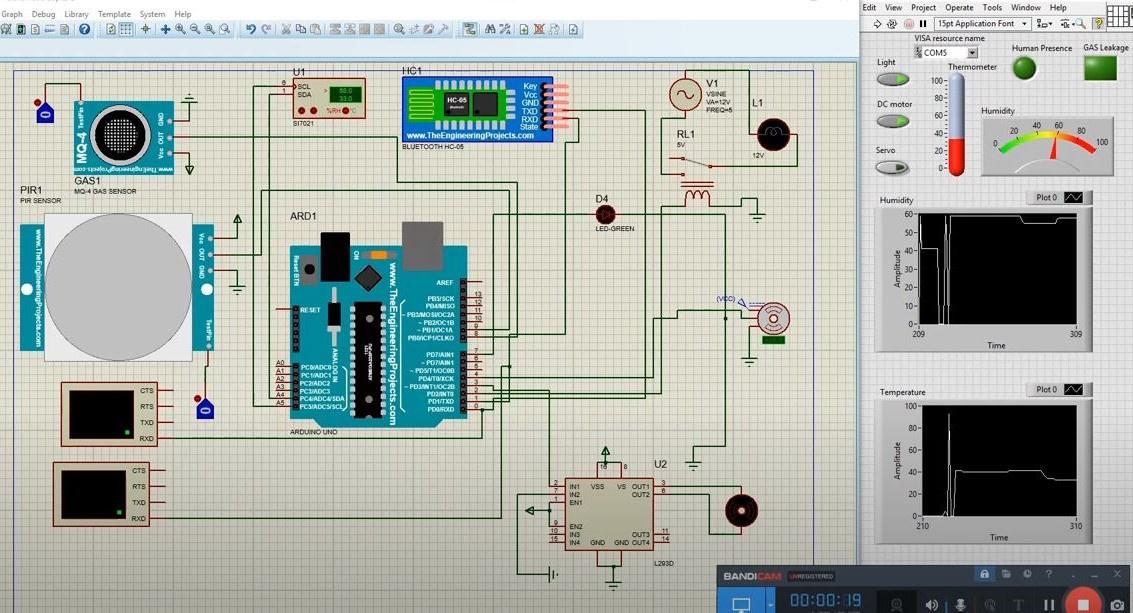
Implementation of Home Automation System Using LabVIEW: This project deals with the design of control and monitor systems for homes using LabVIEW software. This also achieves the remote control operation. Need to control relay based light, dc motor, servo motor and LED by monitoring the temperature, humidity , CO2 and CH4 gas and smoke. Also need to use PIR for detecting human presence. You cannot use DHT11/DHT22. You need to use other sensor than these for temperature and humidity control
University Project
LFR With MSP430
University Project
LFR With MSP430

The MSP430 microcontrollers, featuring a 16-bit RISC architecture, are renowned for their low power consumption. Developed by Texas Instruments, they excel in applications where energy efficiency is crucial, especially in battery-powered devices. This focus on low power makes MSP430 suitable for wearable devices, sensor nodes, and other battery-operated systems. In my first year, I developed a Line Follower Robot (LFR) using MSP430, leveraging its capabilities for energy-efficient designs.
Fun project
CGcalculator
University Project
CGcalculator
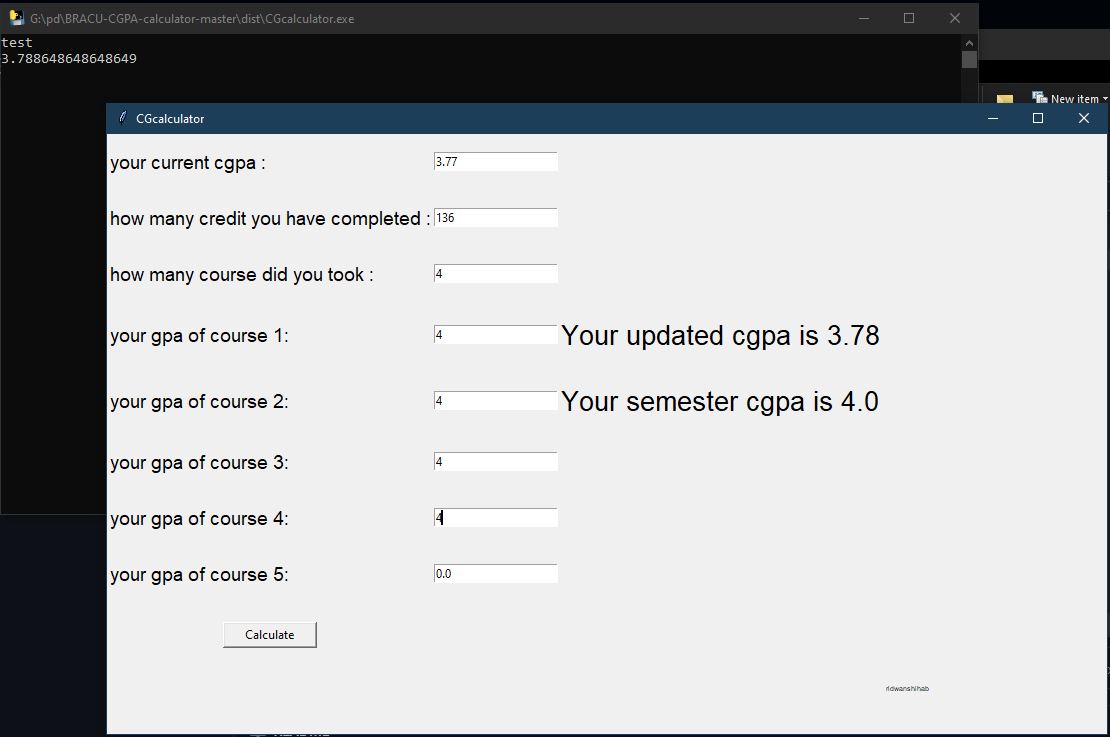
Anticipate your next semester's CGPA by determining the course-wise GPA required to achieve your target. This tool allows you to calculate the specific GPA needed in each course to meet your desired overall CGPA.
Fun project
Other Projects
Fun project
Smartlocker

An fingerprint-enabled smart locker system with GSM security integration. In the event of a break-in attempt, the system triggers an alarm and promptly sends an SMS alert, ensuring heightened security and real-time notifications for unauthorized access.
Fun project
Chitchat

A social platform designed for spontaneous group conversations among diverse individuals.
Fun project
RFID Homeautomation

Blynk RFID Home Automation using ESP8266 with SOS
Events and Activities
Workshop
3D Printing workshop
Workshop
3D Printing workshop
Led a 3D printing session at Feni University, guiding students through the process and imparting practical knowledge on its usage.
University Project
OBE Syllabus Design
University Project
OBE Syllabus Design

Played a pivotal role as a core member of the Outcome-Based Education curriculum development team for Feni University's Computer Science Department. Contributed significantly to the design of laboratory and theoretical Syllabus for multiple courses, adhering to the guidance of Professor Dr. Mohammad Shamsul Arefin.

University Programs
Hosting Programs
University Programs
Successfully hosting Programs
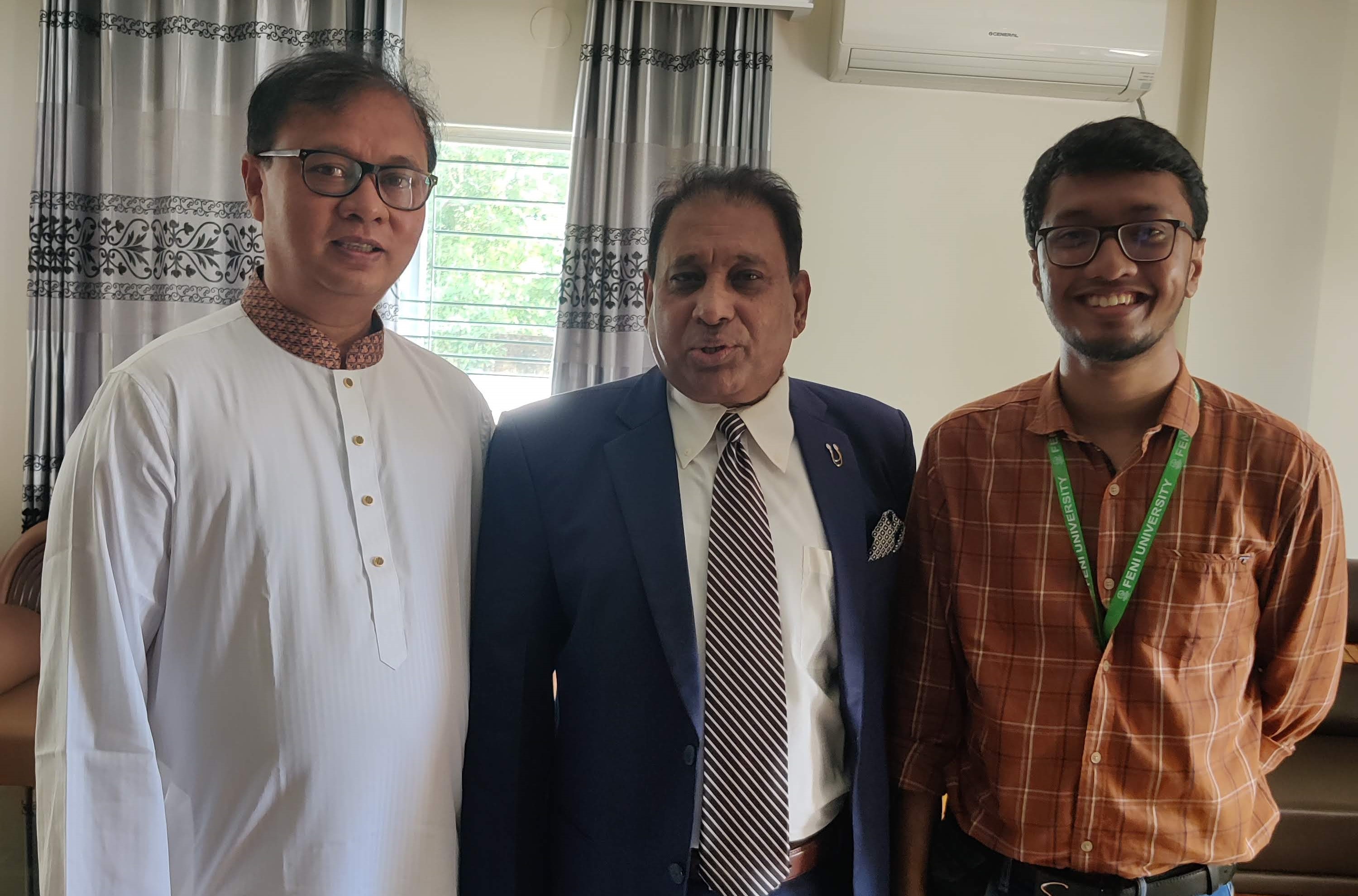

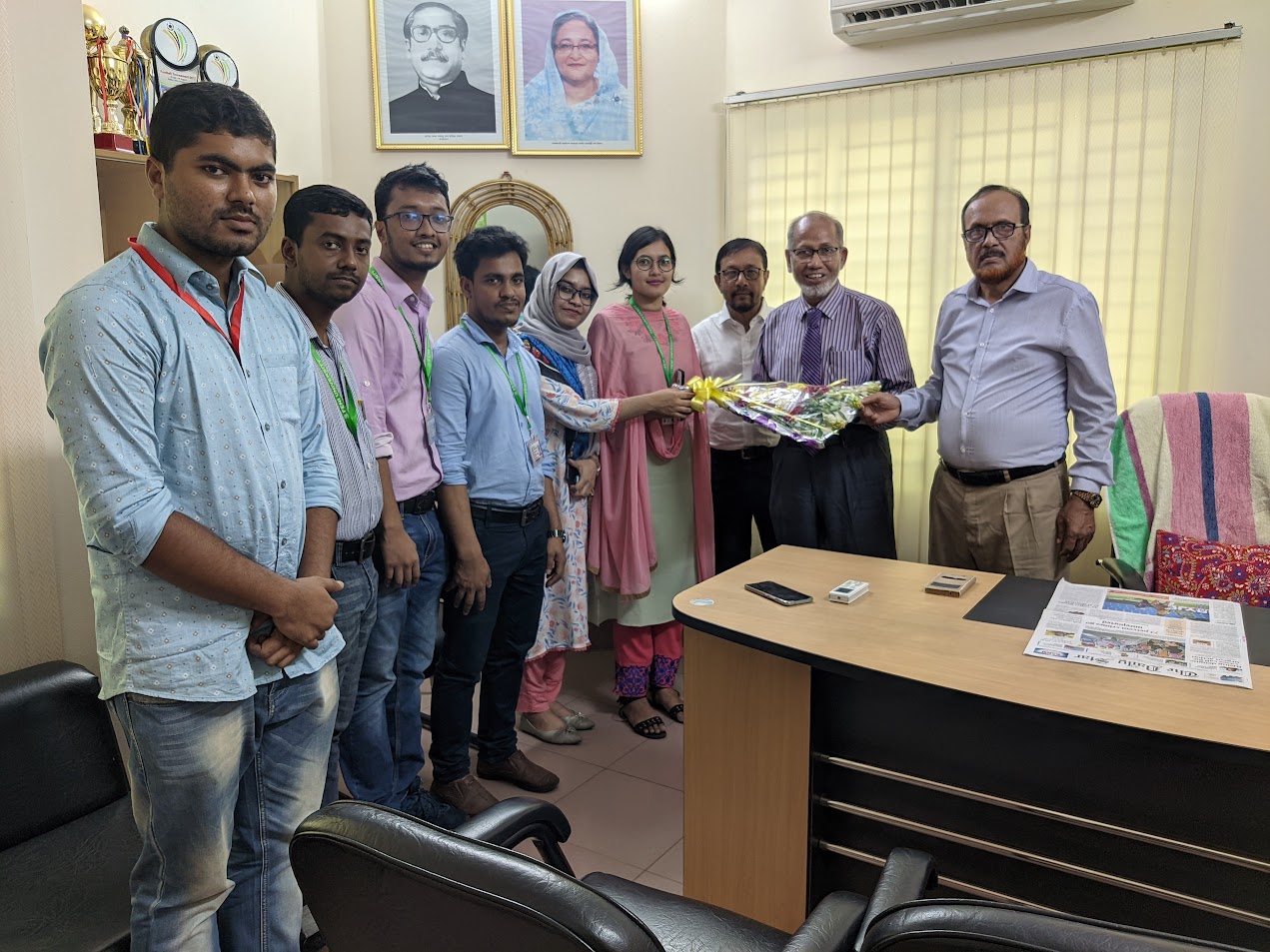
Organized numerous events at Feni University, playing host to esteemed individuals from various parts of the country. Captured in a photograph is a meeting with the former Vice-Chancellor of Chittagong University, Iftekhar Uddin Chowdhury. Additionally, in the photo farewell event of the former VC of Feni University, Prof. Dr. Md. Saifuddin Shah, welcoming ceremony for the new VC, Professor Dr. M. Jamaluddin Ahmed.

Project
Showcasing to Minister
Project
Showcasing to ICT Minister

Demonstrating our project to the ict minister
Tutorial Class
Exam Bell
Tutorial Class
BUCC Exam Bell
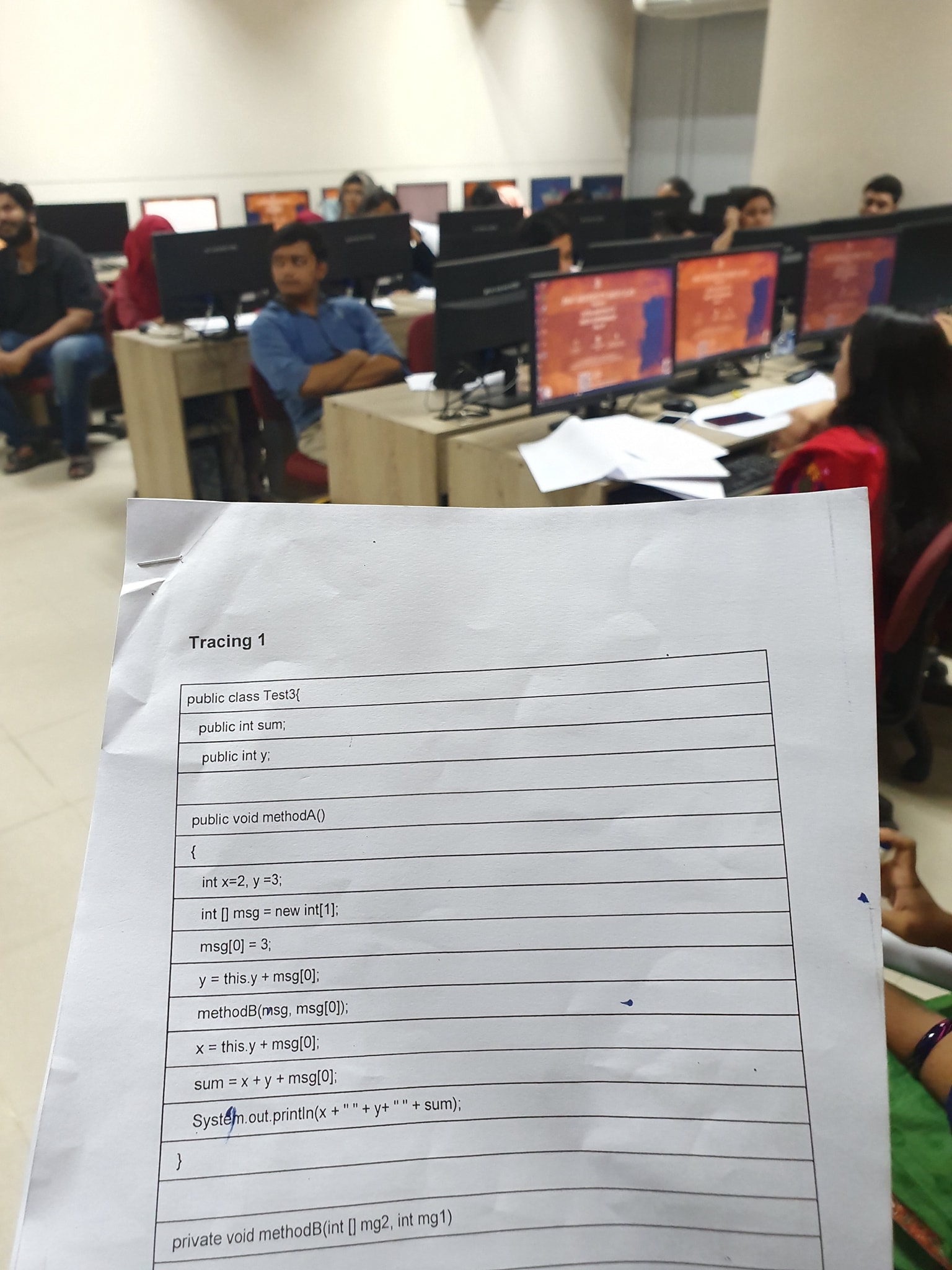
I was also the lead instructor in BUCC Exambell and BUCC Academy, where we took voluntary classes for junior students so that they could have a good last-minute preparation.

Presenting and learning
BRACU QC BootCamp
Presenting and learning
BRACU QC BootCamp
I had the honor of being a speaker at the BRACU Quantum Computing Bootcamp, where I shared insights and perspectives on the Basics of Quantum Error-Correction and Stabilizer Codes.
Contact
Get In Touch
If you have any suggestion, project or even you want to say “hello”, please fill out the form below and I will reply you shortly.




